Les affectations des entrées et sorties des différentes informations et actions sont représentées dans le tableau ci-dessous :
Affectation des entrées sur l’automate TSX 17 :
|
Informations |
Codage A.P.I. |
|
|
pin |
I 0 |
pince fermée |
|
pr0 |
I 1 |
poignet tourné bas |
|
pr1 |
I 2 |
poignet tourné haut |
|
h0 |
I 3 |
pince rentrée |
|
h1 |
I 4 |
pince sortie |
|
v0 |
I 5 |
bras en bas |
|
v1 |
I 6 |
bras en haut |
|
br0 |
I 7 |
base tournée côté évacuation |
|
br1 |
I 8 |
base tournée côté arrivage |
|
avt1 |
I 9 |
détecteur photoélectrique présence pièce |
|
A |
I 18 |
détecteur photoélectrique a |
|
B |
I 19 |
détecteur photoélectrique b |
|
Arrêt urgence |
I 20 |
bouton poussoir arrêt |
|
dcy |
I 21 |
bouton poussoir départ de cycle |
Affectation des sorties sur l’automate TSX 17 :
|
Actions |
Codage A.P.I. |
|
|
AVT |
O 01 |
mise sous tension tapie |
|
VR |
O 02 |
voyant fonctionnement robot |
|
P+ |
O 03 |
fermeture de la pince |
|
PR+ |
O 04 |
rotation de la pince vers le haut |
|
PR- |
O 05 |
rotation de la pince vers le bas |
|
H+ |
O 06 |
avancer la pince |
|
H- |
O 07 |
reculer la pince |
|
V+ |
O 08 |
monter le bras |
|
V- |
O 09 |
descendre le bras |
|
BR+ |
O 10 |
rotation de la base vers côté arrivage |
|
BR- |
O 11 |
rotation de la base vers côté évacuation |
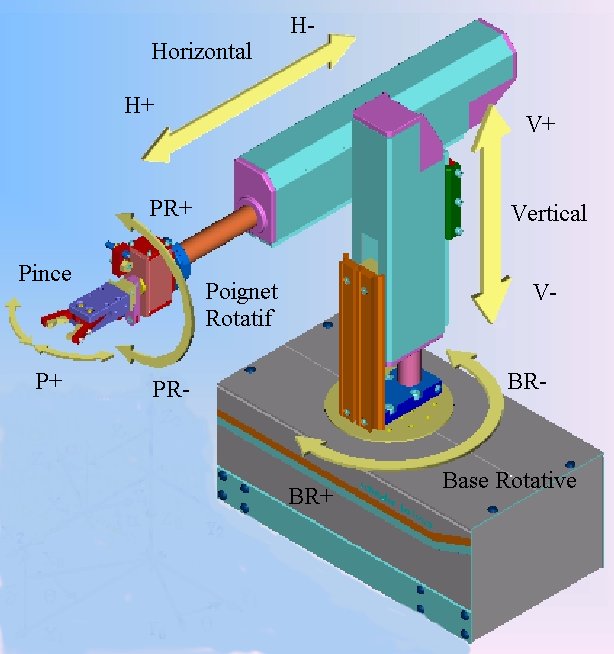
Schémas représentatif des affectations :