Il possède un mode de fonctionnement simple, il se compose de nombreux vérins, permettant de réaliser des fonctions diverses et variées. L’utilisation principale dans l’industrie est le tri de pièces car il possède une capacité à retourner une pièce. Ce robot possède un grand avantage, il évoluera selon les applications demandées.
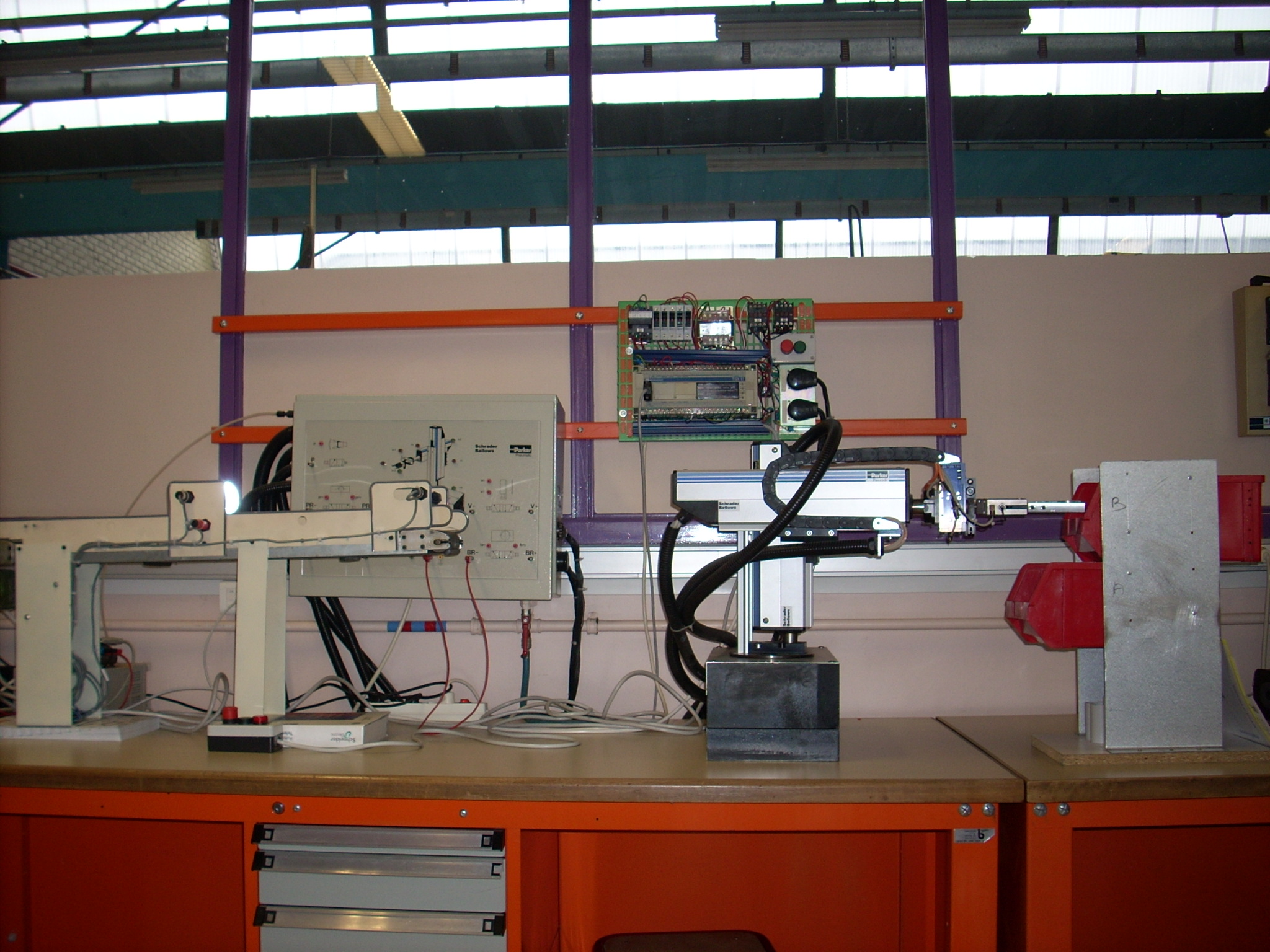
Dans cette étude, nous souhaitons déplacer à l’aide de la pince du bras manipulateur des pièces cylindriques sur une chaine de production automatisée.
L’appréhension des pièces cylindriques est actuellement réalisée par des mors standard en forme de « V », montés sur les doigts de la pince.

Afin de mieux cerner ces pièces (fragiles ou non suivant l’industrie) nous allons modifier ces mors permettant la prise complète de la pièce en question, prouvant ainsi que le robot Schrader s’adapte à tous types de production.